���D��UC3638�����Y��
(2024/1/20 18:00:00)
UC3638�����Y��
UC3638�����Y��
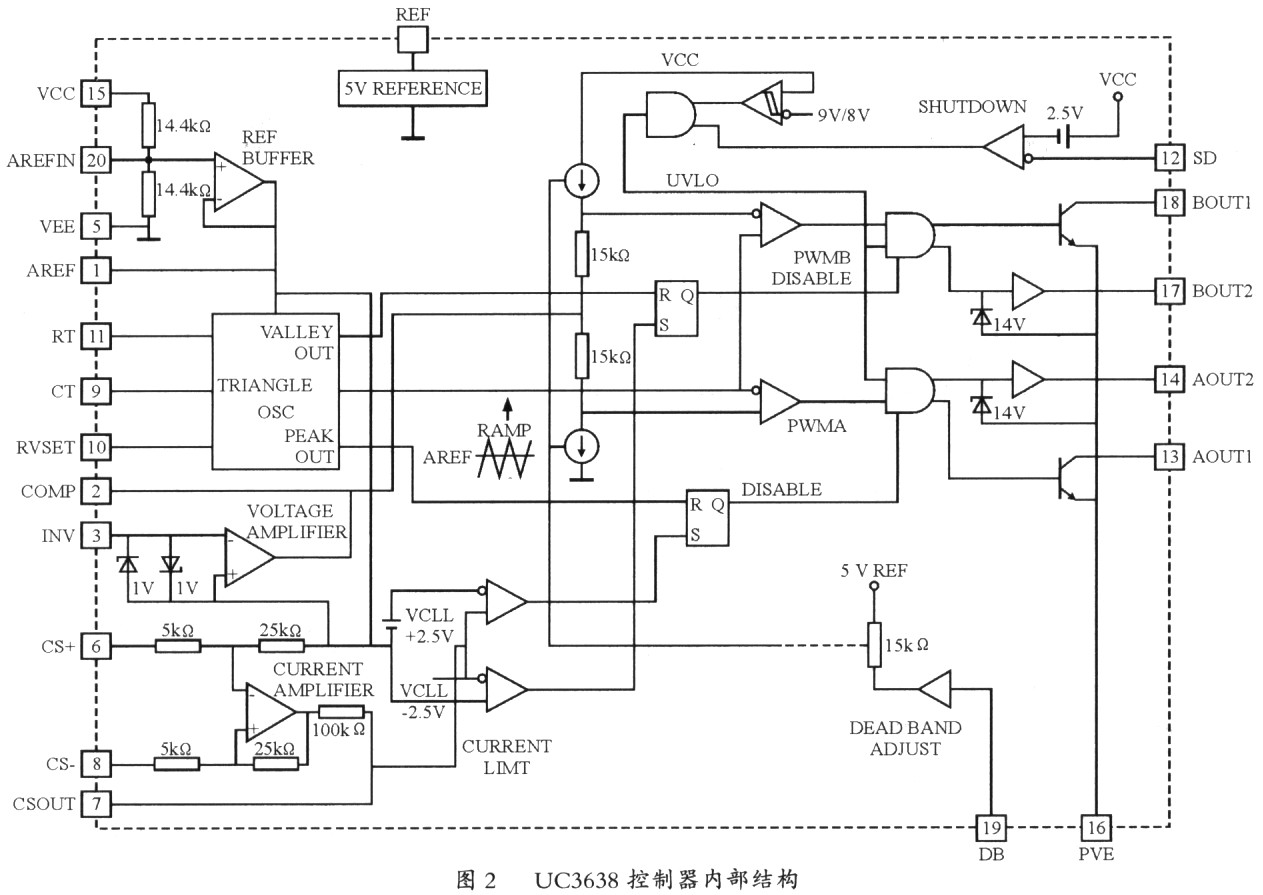
UC3638������ֱ��늙CPWM���������m���ڸ��ֱ��늙CPWM�ӿ��ƣ�߀���Á��OӋ��Ҫ������p������ӵ����ʷŴ�������Ȳ��Y����D2��ʾ����������ģ�M��̖�`��Ŵ�����PWM�{�����������`��Ŵ�ݔ����̖�ĘO�Ժʹ�С��PWM�{����ݔ����·��ͬ�O�Ժ͌��ȵ��}�_������ˣ����������p���{��ϵ�y��������Ҫ�ΘO�Ի��p�O�Կ��{늉�������Ĉ��ϡ����ڸ��M���·�OӋ������˼��ɶȣ�UC3638�p�����S������·Ԫ������߀���������c���·�ٶ������@����ߣ��Ȳ��пɾ��̸��l���Dz��l���������D�Q�����`��Ŵ���������PWM���^����PWM�_�P�l�ʿ��_500kHz�����ӵ�5���̶�����������Ŵ������`��Ŵ�����ϣ��ɘ���ƽ��������������·�����ϵ�y푑��ٶ�(����Ϳ���)����·60V��50mA��늘O�_·ݔ������ȫ���Ϲܣ���·500mA�D�v��ݔ������ȫ���¹ܡ��ɾ������_AREFIN���S���Դ���p�Դ��������ʎ��б�����Ⱥ�PWM���^��5V�։������O�����_PVSET(��ʎ��б�������O��)��DB(PWM���^�O��)�O��������߀�������_��5V����늉�ݔ����Ƿ���i�����p�����ܷ�ֵ������o���b���P�����_(�ɼ���ܛ����)��
UC3638�����Y��
UC3638������ֱ��늙CPWM���������m���ڸ��ֱ��늙CPWM�ӿ��ƣ�߀���Á��OӋ��Ҫ������p������ӵ����ʷŴ�������Ȳ��Y����D2��ʾ����������ģ�M��̖�`��Ŵ�����PWM�{�����������`��Ŵ�ݔ����̖�ĘO�Ժʹ�С��PWM�{����ݔ����·��ͬ�O�Ժ͌��ȵ��}�_������ˣ����������p���{��ϵ�y��������Ҫ�ΘO�Ի��p�O�Կ��{늉�������Ĉ��ϡ����ڸ��M���·�OӋ������˼��ɶȣ�UC3638�p�����S������·Ԫ������߀���������c���·�ٶ������@����ߣ��Ȳ��пɾ��̸��l���Dz��l���������D�Q�����`��Ŵ���������PWM���^����PWM�_�P�l�ʿ��_500kHz�����ӵ�5���̶�����������Ŵ������`��Ŵ�����ϣ��ɘ���ƽ��������������·�����ϵ�y푑��ٶ�(����Ϳ���)����·60V��50mA��늘O�_·ݔ������ȫ���Ϲܣ���·500mA�D�v��ݔ������ȫ���¹ܡ��ɾ������_AREFIN���S���Դ���p�Դ��������ʎ��б�����Ⱥ�PWM���^��5V�։������O�����_PVSET(��ʎ��б�������O��)��DB(PWM���^�O��)�O��������߀�������_��5V����늉�ݔ����Ƿ���i�����p�����ܷ�ֵ������o���b���P�����_(�ɼ���ܛ����)��
3 �p�O�������������ԭ�����OӋ
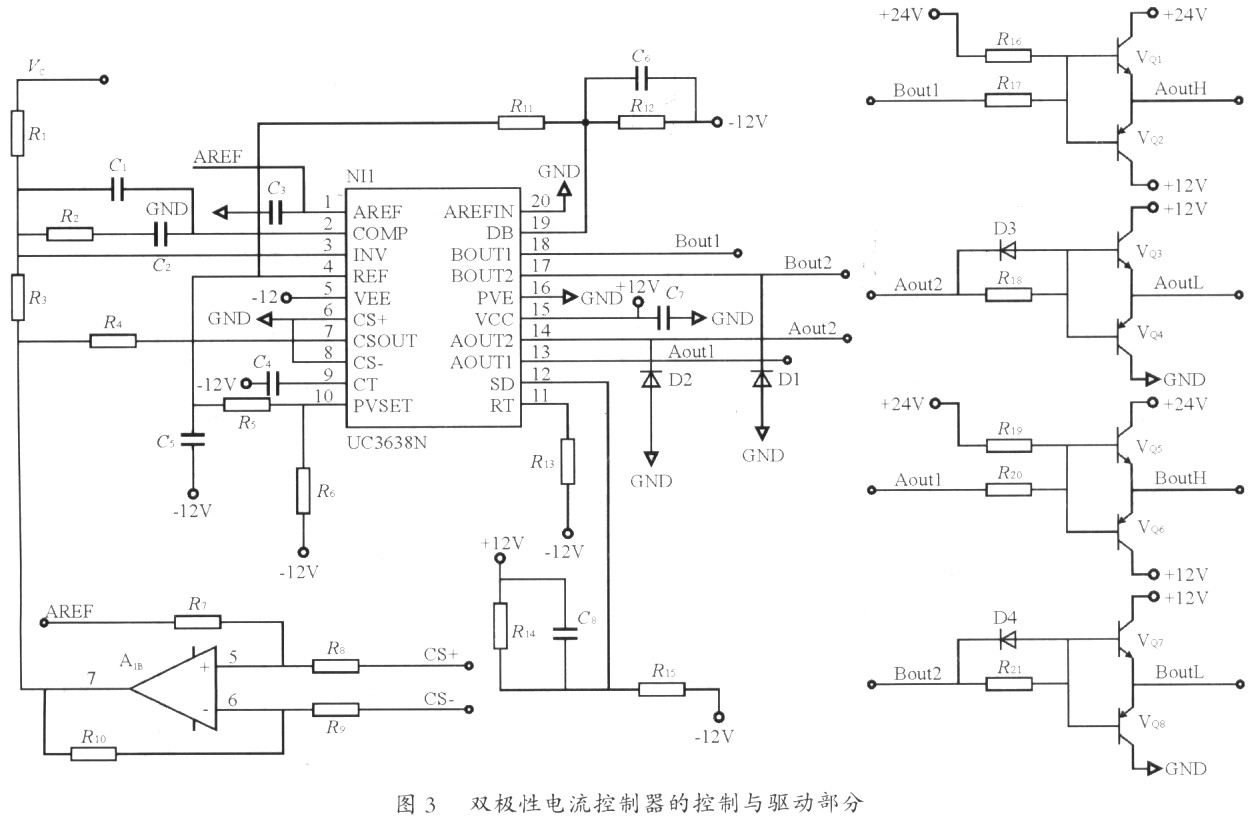
��D3��ʾ�������x�Ŵ��������������̖Vc��R1����ͬ������ӵIJ������Ŵ���A1B�����������̖��R3��ӣ���UC3638�Ȳ����`��Ŵ����M�����PT��(R2��C1��C2�����a���W�j)���ٽ��Ȳ�PWM���^�����γ�PWM������̖Aoutl��Aout2��B0utl��Bout2����VQ1��VQ8�γ�����̖AoutL��AoutH��BoutL��BoutH���ӈD4��VT1��VT2�ɵ�ȫ��ݔ��PWM������̖���ٽ�L1��L2��C11��C12�V���õ��p�O�����(늉�)��TEC(�D4��RTEC)��늡���·�����̖�����RS1��RS2(���H���������ֵ��貢)�z�y����A1A��A1B���ɵķ���Ŵ����Ŵ��������D3�е�A1B����ƽ�����������
3.l UC3638����·�OӋ
1)��D3���D5��ʾ�����OUC3638����Դ��±12V�����Dz��l���������10Vp-p����UC3638���OӋҪ���_PVSET���ƽ�������O�ã�VPKһVVLY=5VIPVSET,VIPVSET=VR6=10��5=2 V��ȡR6��10 kΩ,IR5=IR6=2��(10×lO3)=O��2 mA�� R5=(VAREFһVR6)��IR6=(5-2)��(O��2×lO-3)=15 kΩ��R5ȡ���Ԍ��H�{ԇ��ʡ�
2)���ȡ1V���^늉���5-VDB=1V��VDB=4V��ȡR12��10 kΩ��IR1=IR12=VDB��R12=4/R12=4��10×103=O��4mA��R11=(5-VDV)��IR11=1��(O��4×10-3)=2.5 kΩ��R11ȡֵ�Ԍ��H�{ԇ��ʡ���C6��R12�Ͽɫ@��ܛ��������(����늺����^�ɴ���u�pС)��
3)ȡVCCһVSD=8V(С��2.5 V�M��ܛ���Ӡ�B)��R14=10 kΩ��IR14=IR15=8��10×l0-3=O 8 mA��R15=(2×VCC-VR14)��H15=(24-8)��(O��8×10-3)=20 kΩ����F�ɫ@��оƬ���tʹ�����ԣ���R14�ϲ����C8.
4)ȡ�l�ʰl����������C4��1000 pF������f��=l��(5×RT×CT)��ȡf=35 kHz��R13=RT=1��(5×f×GT)=1��(5×35kHz×1000 pF)≈5��8kΩ��ȡR13��6��2 kΩ����RT=6��2 kΩl�r���_RT�ij��������ƞ�2��4 V��6��2 kΩ=O 387 mA��С��Ҏ�������1mA���ơ�
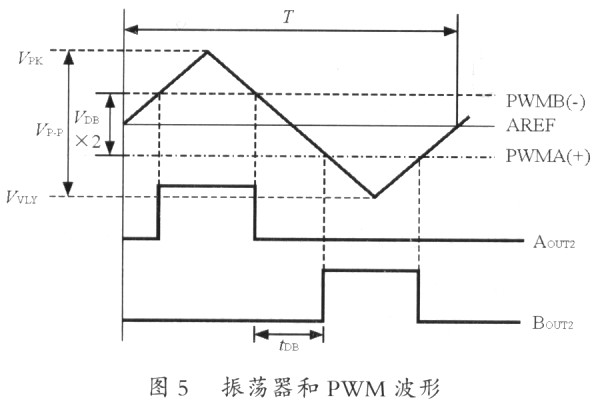
5)������^�r�gtDB=VDB/[(VPK-VVLY)×=(5-VDB)×RT×CT��VPVSET=1×6��8 kΩ×1000 pF��2V=3.4μs����Ҋ���^�r�g�h����MOSFET���_�P�r�g�����H�����пɸ���ݔ�������{��R11��
3.2 ����z�y�·�OӋ
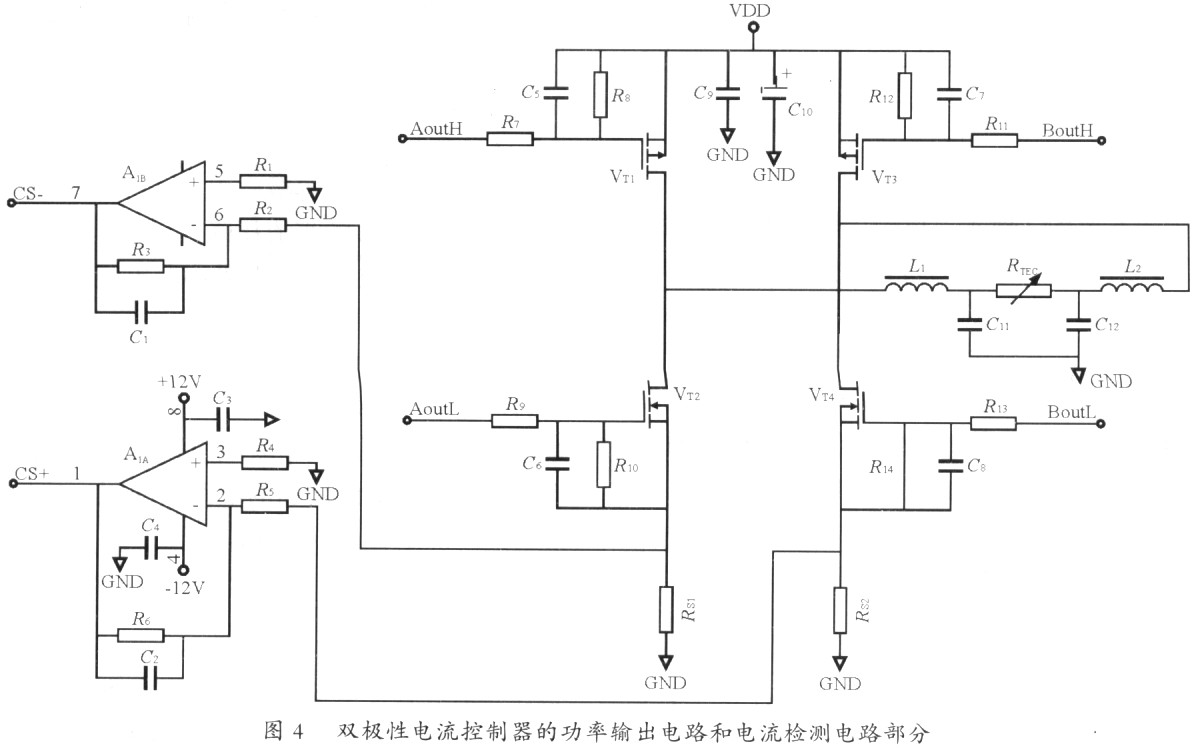
�ڌ��H�����У�������Ҫ������TECģ�K����ʹ������ӟ����书�ʣ�������ݔ��늉�����^��(����OӋֵ±24V��20A�����y±25V��17.5A)�������Ч���ԜpС�l�ᣬ�҂����ö�������ֵ��貢��������z�yȡ����衣�@�ӣ�ԭ��UC3638�Ȳ�������z�y��ַŴ����Ŵ��������ӷŴ����������l�F��PWM���������r�������·�����_�P�ГQ�aţ�ܴ��dv��di��di��dt���ɴˮa����ģ���늉����Ķ�����ܴ�ĵؾ��ɔ_���ڲ�ȡ�˜pС�ɔ_�ĸ��N��ʩ����������Ȳ�����������ֵ�^��(±2��5V)���������������·���i�oݔ�������ǣ��҂�������Ȳ��·ͨ�^����\��(�D3��A1B�͈D4��A1A��A1B)�ķ�ʽ���F�߱��ʵIJ������Ŵ���ƽ��λ(��CS+��CSһ��·�ӵ������Ȳ���ַŴ���)���������IJ������Ŵ�ݔ��ͨ�^�D3�����R4����CSOUT�Ԍ��F���������ƹ��ܡ�ͬ�r����̖ͨ·�ϼ���С����ԞV�����l�ɔ_�����⣬��MOSFFT��Դ�O�g������ԜpС�·�_�P�ГQ����������ŘO����̖�IJ���Ӱ푣�ԓ��ʩ�����^�γ��·һ��ʹ�����ɿ������������l�����¹�ֱͨ�F����Ч������˿����·�ķ����ԡ�
3��3 �Ӻ�ȫ���·
����NPN��PNP���a�_�P�܌�PWMݔ��������̖�M�зŴ���ƽ��λ������P�ϵ���IRFl4905�����Ϲܣ�N�ϵ���IRF3205�����¹ܘ���ȫ���·��ֵ��ע����ǣ���Ҫ��ռ�ձ����ֵ�_��l�r������ʹ����ͨ�ı��·(��������N�ϵ��Ϲ�)���Ϲ��ӡ�
3��4 ݔ��LC�V���·�OӋ
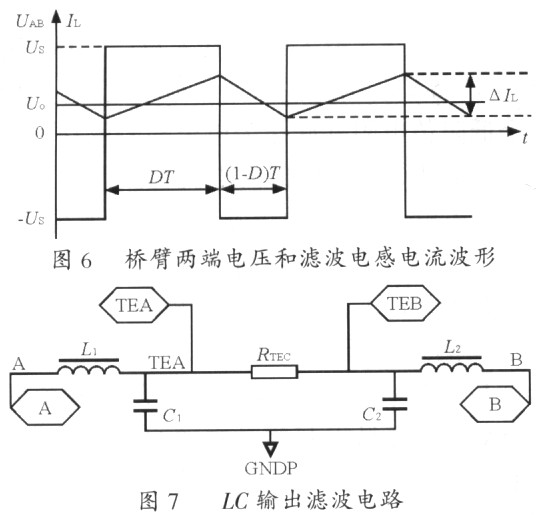
��D6���D7��ʾ���Oһ�����ڃ�TEC�ɶ�늉�Uo���Ʋ�׃��UAB�������c�g늉���US���۹��늉���IL����늸������IOMAX���������ݔ�������D��ռ�ձȣ�TS���_�P���ڣ�fs���_�P�l�ʣ�L=L1=L2��V��늸У�C=C1=C2��V����ݣ�RTEC��TEC�ĵ�Ч��裬�t��LCݔ���V���·�͘�ۃɶ�늉��͞V��늸�������οɵ�
��It=(US-Uo)DTS/(2L)
=(Us+Uo)9(l—D)Ts��(2L) (1)
���Uo=(2Dһ1)Us��
���ԡ�IL=D(1һD)TsUs/L��
��D=0��5�r��IL�����ֵ��ILMAX=Us��(4fsL)�����x��Lʹ�y�������IL����������LOMAX��(10��20)��������TEC�����_���Ĝز��S�y�������������pС������ƵĽ��~��ʽ��
dθ��dθMAX=1��(1+N2) (2)
ʽ�У�dθ��TEC������мy���������_���Ĝز
dθMAX��TEC��ֱ������������_�������ز
N������y��ϵ����ͨ��������Ҫ������y��ϵ�����ô���10����
����TEC�y��������ƌ��^���s���@��x�o���īI���һ�����㹫ʽ��������

ʽ�У�fs����ʎ�����l��Ҳ����PWM늉����_�P�l�ʣ�
L=L1=L2��V������늸�����
C=C1=C2��V�������������
RTECTEC�ĵ�Ч��裻
VTEC��TEC��ֱ��������
ESR��V����ݵĵ�Ч����裻
VS��ȫ����Դ늉���
ʽ(3)�����ڞV��늸С����늉���ģ�K�ȴ_������r�£�����_�P�l�ʡ����ӞV������������pС�V����ݵĵ�Ч�����ɜpС����y������Ȼ��Ҫ����ɴ����ӵ��·����e�����ĵ�������K�_��L��C��fs��ֵ��
4 ���Y��
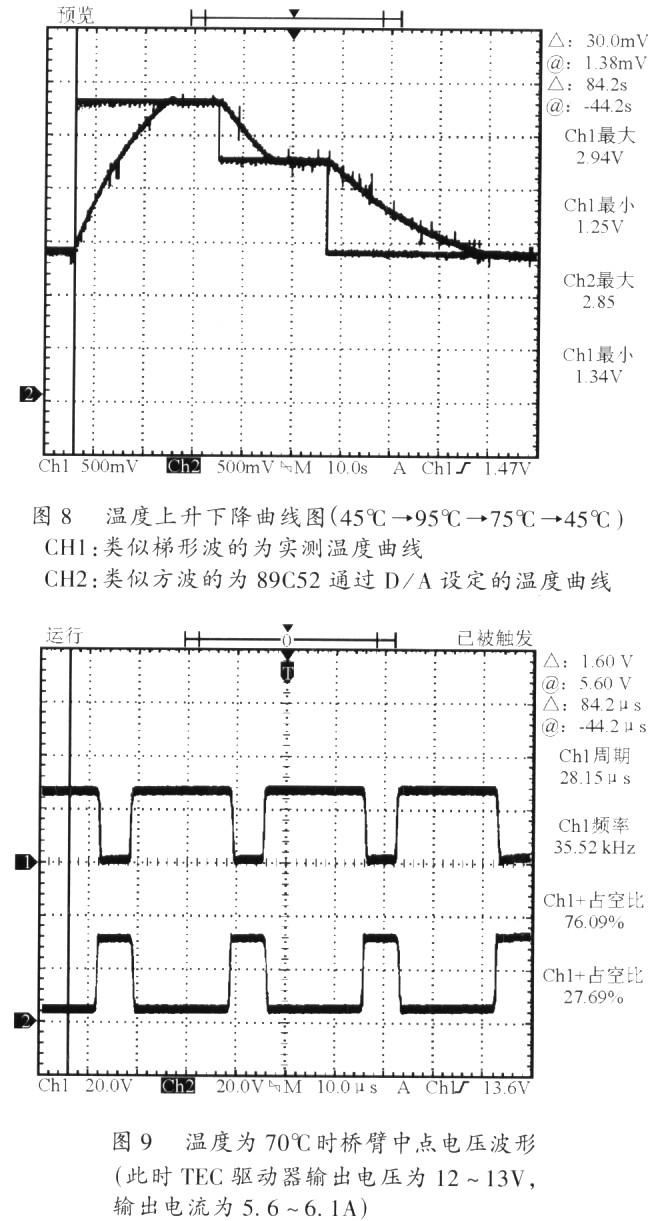
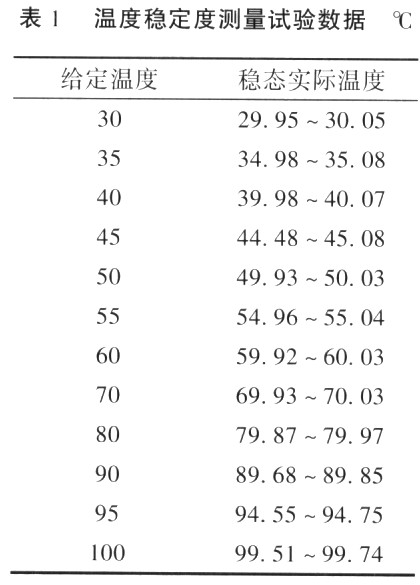
�քe��ֱ��������Ʒ�ʽ(PID��89C52���)�͜ضȽo�����Ʒ�ʽ(PID��ģ�M�·���)�M���ˌ��l�Fֱ��������Ʒ�ʽ�����ֿ����㷨�^�y�OӋ������Ч��������ģ�MPID���Ʒ�ʽ��(�H�_��±O��3��)���H�����m������ı����{����(�в����)�����m�������l�����M��˥�p����89C52�o���ضȲ����κ��{��(�����ֿ������_�h)�����ڜضȷ����ȿ��_±O��15�����ң������ֽo���ض��_�h����ģ�M�{�����ڜضȿ��ܲ����O���c��(һ��������������λPC�C�o���ضȣ���ʼD��A�o��ֵ���Ǻܜʴ_����һ����ģ�M�·����Ư��)���L�ڷ����Ȳ��ã�����҂�����89C52�M�Д���Ŀ�˿��ƣ���Ŀ���ǣ���ʹ��ʼD��A���ֽo��ֵ���Ǻܜʴ_����1�桫2�棬ͨ�^�����Д࣬�Ԅ��{��89C52�͵�D��A�Ĕ�������ʹ��K���Ɯض��_����λPC�C�ĜضȽo��ֵ�����l�F�����㷨��������r�£���������ߜضȷ����ȡ���ȡ���ϴ�ʩ���ضȷ�����С��±O��15��(�����M�㷨��߀����ߵĿ��ܣ���������^�쵽�@һ�c�����ضȿ��Ʒ�������������)���ض�ƫ����(�ضȜʴ_��)С��±O��5�档�D8���D9����1����2�nj��Y����
�g�[��(110)| �uՓ(
0
)
![IC�]ُ�W���Ԫ��Ʒ�|����](/static/img/950.jpg)