���D��ͬ��늄әC���A֪�R(�D��)
(2011/11/6 9:16:00)
ͬ��늄әC���A֪�R(�D��)
ͬ��늄әC���A֪�R
ͬ��늄әC��ͬ���l늙C�Y����ͬ����dz3w�Wվ�v�^��ֱ���l늙C������ֱ��늄әCʹ��һ�ӣ�ͬ���l늙CҲ��������ͬ��늄әCʹ�á�
ͬ��늄әC���ԘO�����l�����_����ͬ���D�٣�����D�ٺ㶨��
��ͬ��늄әC�����Կ�֪���书�������{�������ڹ�����100�����\�С�
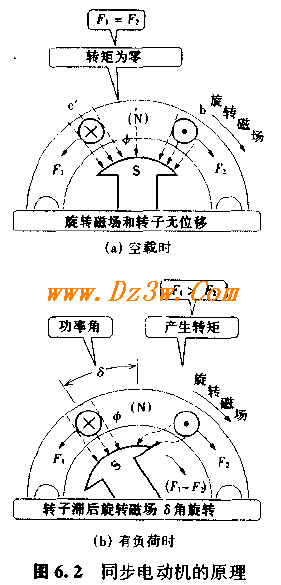
ͬ��늄әC�Ą�������늘����֮�g�������Pϵ���������^�� V ����������˥ʾ��
ͬ��늄әC�o�����D�أ������韩��
������@Щ���ԣ������@�N늄әCһ��������Ҫ�㶨�ٶȵ�������ϡ�
6.1 ͬ��늄әC��ԭ���ͽY��
ͬ��늄әC�Б�늄әC�ą^�e
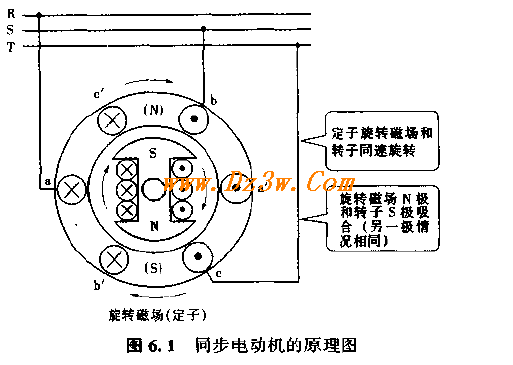
6 . 1 . 1 ͬ��늄әC��ԭ��
��a�����d�r���a���D��
�����D�ň����D����ͬ���ٶ����D����ȫ���d����r�£��D�ӵ� S �O�����D�ň���N �O�����D�б�����ͬλ�á�
���D�ň� N �O���Ҍ��w��C'',b ����늴�������������ֶ��t�_�����ɈD 6 . 2 ( a ����֪���Ҍ��w���������෴������С��ͬ����ˣ���������������a���D�ء�
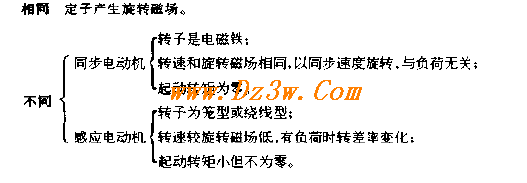
( b ��ؓ�ɕr���D�ň����D��֮�g��λ��ƫ��
δ�����D�ň��ŘO���D�ӴŘO֮�g��λ��ƫ�ƽǣ����Sؓ�ɹ��ʶ�׃�����ʷQ���ʽǡ�
�D�Ӝ������D�ň�δ�ǣ�������∏/2[rad]���c���d�r��ͬ�����D�ӵ�λ��ƫ�ƣ����҃�߅�Č��w�����Ĵ�С���в�e���mȻ늴��������D�ň������෴�����@һ���ķ�����ʹ�D�Ӯa���D�ء�
ͬ��늄әC���A֪�R
ͬ��늄әC��ͬ���l늙C�Y����ͬ����dz3w�Wվ�v�^��ֱ���l늙C������ֱ��늄әCʹ��һ�ӣ�ͬ���l늙CҲ��������ͬ��늄әCʹ�á�
ͬ��늄әC���ԘO�����l�����_����ͬ���D�٣�����D�ٺ㶨��
��ͬ��늄әC�����Կ�֪���书�������{�������ڹ�����100�����\�С�
ͬ��늄әC�Ą�������늘����֮�g�������Pϵ���������^�� V ����������˥ʾ��
ͬ��늄әC�o�����D�أ������韩��
������@Щ���ԣ������@�N늄әCһ��������Ҫ�㶨�ٶȵ�������ϡ�
6.1 ͬ��늄әC��ԭ���ͽY��
ͬ��늄әC�Б�늄әC�ą^�e
6 . 1 . 1 ͬ��늄әC��ԭ��
��a�����d�r���a���D��
�����D�ň����D����ͬ���ٶ����D����ȫ���d����r�£��D�ӵ� S �O�����D�ň���N �O�����D�б�����ͬλ�á�
���D�ň� N �O���Ҍ��w��C'',b ����늴�������������ֶ��t�_�����ɈD 6 . 2 ( a ����֪���Ҍ��w���������෴������С��ͬ����ˣ���������������a���D�ء�
( b ��ؓ�ɕr���D�ň����D��֮�g��λ��ƫ��
δ�����D�ň��ŘO���D�ӴŘO֮�g��λ��ƫ�ƽǣ����Sؓ�ɹ��ʶ�׃�����ʷQ���ʽǡ�
�D�Ӝ������D�ň�δ�ǣ�������∏/2[rad]���c���d�r��ͬ�����D�ӵ�λ��ƫ�ƣ����҃�߅�Č��w�����Ĵ�С���в�e���mȻ늴��������D�ň������෴�����@һ���ķ�����ʹ�D�Ӯa���D�ء�
6 . 1 . 2 ͬ��늄әC�ĽY��
�cͬ���l늙C�Y����ͬ�����ˮa�������D�أ����D�����b������ڸБ�늄әC�Ļ\���@�M�������@�M��
6.2ͬ��늄әC�����|������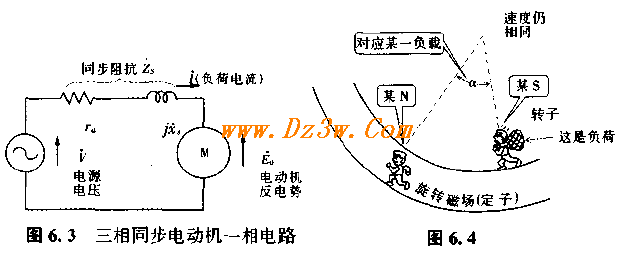
6.2.1 ͬ��늄әC�������D
6.2 . 2 ݔ�����ʺ� sinδ������
������늄әC�ēp�ģ��tһ��ݔ������ P ��
6.2.3 �D�غ�sinδ������
늄әC���� P[W]���D��T[N*m]�g���Pϵ���£�
���D�غ���һ��Ҳ������sinδ.
6 . 2 .4 늄әC�D����������
���������ęM���˞鹦�ʽ�sinδ���v���˞��D�ء�
�����D���csinδ�����ȣ�����siδ=90�Ȟ����
���ʽ���늽Ƕȣ��O�����࣬�t���g��С�����H�\�Еr��ռ�s�� 20�� ���ҡ�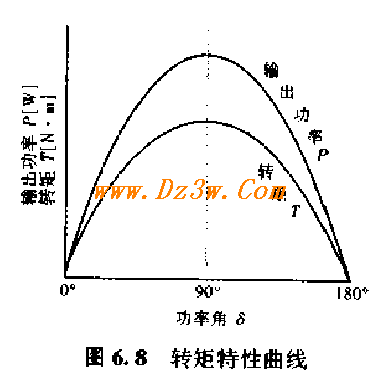
6 . 2 . 5 ʧ��ͣ�D
ͬ��늄әC������ͬ���D�����D��ؓ�����ӕr���ʽ�׃���D�pС�������ܳГ�ؓ���D�ؕr��늄әCͣ�D���@�Q��ʧ�����˕r���D�طQ��ʧ���D�ء����H��ʧ���D���ڹ��ʽǞ� 50��-70�� �ķ������@��ָ늄әC���~���l�ʺ�늉����������Ą���\�Еr���܉��� l ��犕r�g���^�m�\�е�����D�ء�
6. 2 . 6 ��ź���λ���Pϵ
6.2.7 V�������������������
�D�ӄ������Ƿ��r��늘��������늉�������ŏ����^��r�������ǰ��
����늘�����̈́������Pϵ����������λ����������Ҳ�Q V ���������@�����������Π��������
������ 100 �����c�������Ĺȡ�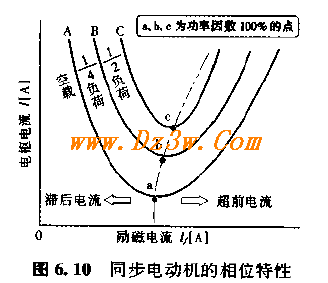
6.3 ͬ��늄әC�����ӷ���
ͬ��늄әC�o�����D�أ��D���БT�������������D�ň����D���D�ӡ����ӻ���֮�g�Ĵň� NS �������D�ӵ��������҃ɂ�������ȣ�늙C�������D�������D 6 . 11 ����
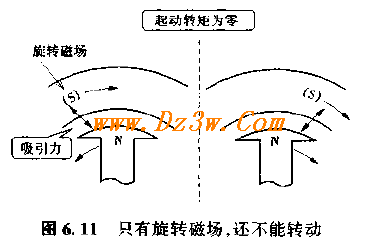
(l)�������ӷ����������@�M�����������Ҋ��һ���������ӷ�����
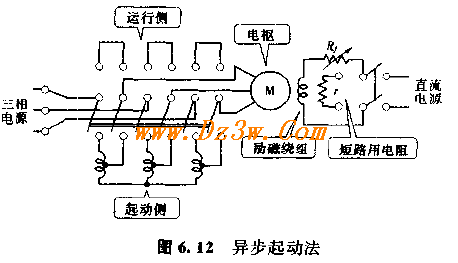
��������Б�늄әC�\���D�ӿ��]���������D�ӴŘO�����b�O�ö�·�h���˭h���͌��l���ɵ������@�M�������D���mȻС�����\�Б�늄әC߀���������D�صġ�
���ӕr늘в�ʩ��ȫ늉���ͨ�^�����a��������늿���������׃�����Ȱ�늉����ͺ����ӡ�
���˷�ֹ���ӕr�^�ߵĸБ�늉����@�M�p�ģ��ڄ���·�н��������r0.
������Б�늄әC���ӣ��Ƚӽ�ͬ���D�ٕr����
�o����@�Mʩ��ֱ��늉��������D 6 . 12 ����
(2)�o��늄әC���ӷ����ڴ�����늄әC��
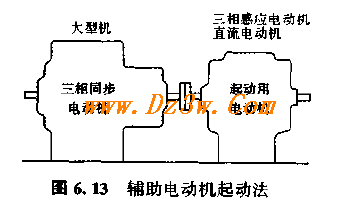
�������õ�����Б�늄әC��ֱ��늄әCֱ�ӽ��ڱ�����늙C�ϡ������o��늄әC�����C�ϵ��ӽ���ͬ���ٶȕr������ͬ���l늙C���\�еķ�����ͬ��늄әCͶ���\�С�֮���г������õ��o��늄әC�Դ������D�������D 6 . 13 ����
6 . 3 . 2 ͬ��늄әC����ʎ
��ؓ�ɡ��Դ늉����l�ʰl��׃���r�����ʽ�ռ���^�ɵ��µĹ��ʽǡ��˕r�����D�ӵđT�ԣ����ʽnj��l�������Ե�׃�����@�Q����ʎ�������l�����ص���ʎ������ʧ����늄әC����ͣ�D�������@�M�������@�N��ʎ������‘�����D 6 . 14 ����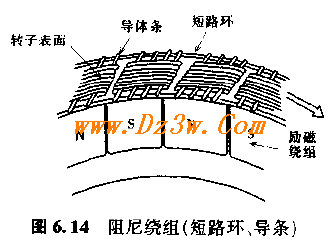
�g�[��(2475)| �uՓ(
0
)
- ��һƪ�� ���D��ֱ���l늙Cԭ��(�D��)
![IC�]ُ�W���Ԫ��Ʒ�|����](/static/img/950.jpg)